Mutual Information Metric#
The MutualInformationImageToImageMetric class computes the mutual information between two images, i.e. the degree to which information content in one image is dependent on the other image. This example shows how MutualInformationImageToImageMetric can be used to map transformation parameters and register two images using a gradient ascent algorithm.
[1]:
import os
import numpy as np
import matplotlib.pyplot as plt
from matplotlib import cm
from urllib.request import urlretrieve
import itk
from itkwidgets import view
[2]:
dim = 2
ImageType = itk.Image[itk.F, dim]
FixedImageType = ImageType
MovingImageType = ImageType
Retrieve fixed and moving images for registration#
We aim to register two slice images, one of which has an arbitrary offset.
[3]:
fixed_img_path = "BrainT1SliceBorder20.png"
moving_img_path = "BrainProtonDensitySliceShifted13x17y.png"
[4]:
if not os.path.exists(fixed_img_path):
url = "https://data.kitware.com/api/v1/file/5cad1ae88d777f072b18183d/download"
urlretrieve(url, fixed_img_path)
if not os.path.exists(moving_img_path):
url = "https://data.kitware.com/api/v1/file/5cad1ae88d777f072b181831/download"
urlretrieve(url, moving_img_path)
[5]:
fixed_img = itk.imread("BrainT1SliceBorder20.png", itk.F)
moving_img = itk.imread("BrainProtonDensitySliceShifted13x17y.png", itk.F)
[6]:
view(fixed_img)

[6]:
<itkwidgets.viewer.Viewer at 0x7f244ecbcfa0>
[7]:
view(moving_img)

[7]:
<itkwidgets.viewer.Viewer at 0x7f244c4f8a60>
Prepare images for registration#
[8]:
fixed_normalized_image = itk.normalize_image_filter(fixed_img)
fixed_smoothed_image = itk.discrete_gaussian_image_filter(fixed_normalized_image, variance=2.0)
moving_normalized_image = itk.normalize_image_filter(moving_img)
moving_smoothed_image = itk.discrete_gaussian_image_filter(moving_normalized_image, variance=2.0)
[10]:
view(fixed_smoothed_image)

[10]:
<itkwidgets.viewer.Viewer at 0x7f243fdc6ac0>
Plot the MutualInformationImageToImageMetric surface#
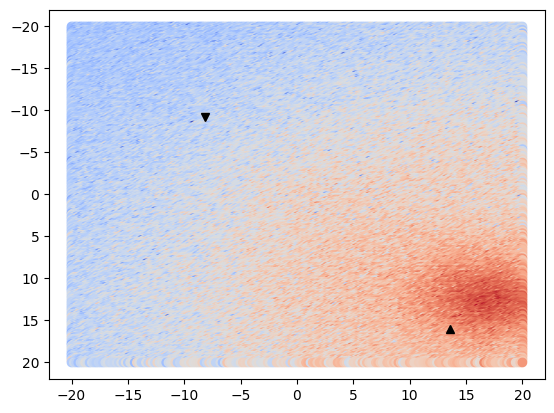
For this relatively simple example we seek to adjust only the x- and y-offset of the moving image with a TranslationTransform. We can acquire MutualInformationImageToImageMetric values comparing the two images at many different possible offset pairs with ExhaustiveOptimizer and visualize this data set as a surface with matplotlib.
[11]:
# Move at most 20 pixels away from the initial position
window_size = [20, 20]
# Collect 100 steps of data along each axis
n_steps = [100, 100]
[12]:
TransformType = itk.TranslationTransform[itk.D, dim]
OptimizerType = itk.GradientDescentOptimizer
ExhaustiveOptimizerType = itk.ExhaustiveOptimizer
MetricType = itk.MutualInformationImageToImageMetric[ImageType, ImageType]
RegistrationType = itk.ImageRegistrationMethod[ImageType, ImageType]
InterpolatorType = itk.LinearInterpolateImageFunction[ImageType, itk.D]
[13]:
transform = TransformType.New()
metric = MetricType.New()
optimizer = ExhaustiveOptimizerType.New()
registrar = RegistrationType.New()
interpolator = InterpolatorType.New()
[14]:
metric.SetNumberOfSpatialSamples(100)
metric.SetFixedImageStandardDeviation(0.4)
metric.SetMovingImageStandardDeviation(0.4)
[15]:
optimizer.SetNumberOfSteps(n_steps)
# Initialize scales and set back to optimizer
scales = optimizer.GetScales()
scales.SetSize(2)
scales.SetElement(0, window_size[0] / n_steps[0])
scales.SetElement(1, window_size[1] / n_steps[1])
optimizer.SetScales(scales)
[16]:
registrar.SetFixedImage(fixed_smoothed_image)
registrar.SetMovingImage(moving_smoothed_image)
registrar.SetOptimizer(optimizer)
registrar.SetTransform(transform)
registrar.SetInterpolator(interpolator)
registrar.SetMetric(metric)
registrar.SetFixedImageRegion(fixed_img.GetBufferedRegion())
registrar.SetInitialTransformParameters(transform.GetParameters())
[17]:
# Collect data describing the parametric surface with an observer
surface = dict()
def print_iteration():
surface[tuple(optimizer.GetCurrentPosition())] = optimizer.GetCurrentValue()
optimizer.AddObserver(itk.IterationEvent(), print_iteration)
[17]:
0
[18]:
registrar.Update()
[19]:
# Check the extreme positions within the observed window
max_position = list(optimizer.GetMaximumMetricValuePosition())
min_position = list(optimizer.GetMinimumMetricValuePosition())
max_val = optimizer.GetMaximumMetricValue()
min_val = optimizer.GetMinimumMetricValue()
print(max_position)
print(min_position)
[13.600000000000001, 16.0]
[-8.200000000000001, -9.200000000000001]
[20]:
# Set up values for the plot
x_vals = [list(set([x[i] for x in surface.keys()])) for i in range(0, 2)]
for i in range(0, 2):
x_vals[i].sort()
X, Y = np.meshgrid(x_vals[0], x_vals[1])
Z = np.array([[surface[(x0, x1)] for x1 in x_vals[0]] for x0 in x_vals[1]])
[21]:
# Plot the surface as a 2D heat map
fig = plt.figure()
plt.gca().invert_yaxis()
ax = plt.gca()
surf = ax.scatter(X, Y, c=Z, cmap=cm.coolwarm)
ax.plot(max_position[0], max_position[1], "k^")
ax.plot(min_position[0], min_position[1], "kv")
[21]:
[<matplotlib.lines.Line2D at 0x7f23e837d4f0>]
[22]:
# Plot the surface as a 3D scatter plot
fig = plt.figure()
ax = fig.add_subplot(projection="3d")
surf = ax.plot_surface(X, Y, Z, cmap=cm.coolwarm)
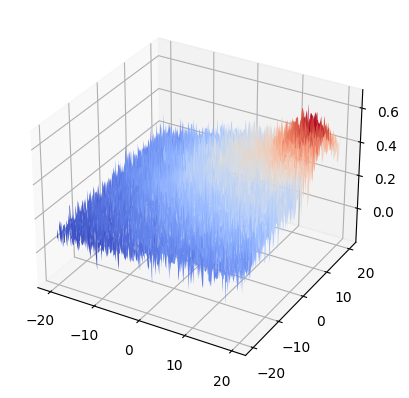
Follow gradient ascent#
Once we understand the shape of the parametric surface it is easier to visualize the gradient ascent algorithm. We see that there is some roughness to the surface, but it has a clear slope upwards. We want to maximize the mutual information between the two images in order to optimize registration. The results of gradient ascent optimization can be superimposed onto the matplotlib plot.
[23]:
n_iterations = 200
[24]:
transform = TransformType.New()
metric = MetricType.New()
optimizer = OptimizerType.New()
registrar = RegistrationType.New()
interpolator = InterpolatorType.New()
[25]:
registrar.SetFixedImage(fixed_smoothed_image)
registrar.SetMovingImage(moving_smoothed_image)
registrar.SetOptimizer(optimizer)
registrar.SetTransform(transform)
registrar.SetInterpolator(interpolator)
registrar.SetMetric(metric)
registrar.SetFixedImageRegion(fixed_img.GetBufferedRegion())
registrar.SetInitialTransformParameters(transform.GetParameters())
[26]:
metric.SetNumberOfSpatialSamples(100)
metric.SetFixedImageStandardDeviation(0.4)
metric.SetMovingImageStandardDeviation(0.4)
optimizer.SetLearningRate(15)
optimizer.SetNumberOfIterations(n_iterations)
optimizer.MaximizeOn()
[27]:
descent_data = dict()
descent_data[0] = (0, 0)
def log_iteration():
descent_data[optimizer.GetCurrentIteration() + 1] = tuple(optimizer.GetCurrentPosition())
optimizer.AddObserver(itk.IterationEvent(), log_iteration)
[27]:
0
[28]:
registrar.Update()
[29]:
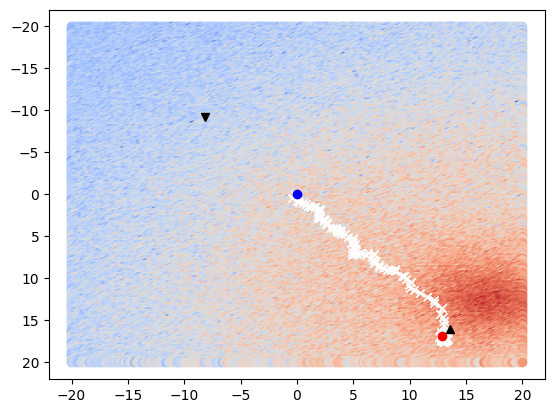
print(f"Its: {optimizer.GetCurrentIteration()}")
print(f"Final Value: {optimizer.GetValue()}")
print(f"Final Position: {list(registrar.GetLastTransformParameters())}")
Its: 200
Final Value: 0.6287786636295714
Final Position: [13.06874645780319, 16.707359598970985]
[30]:
x_vals = [descent_data[i][0] for i in range(0, n_iterations)]
y_vals = [descent_data[i][1] for i in range(0, n_iterations)]
We see in the plot that the metric improves as transformation parameters are updated with each iteration. The value of the metric at each step generally increases, yielding a final value very close to the optimal position in the parameter space window.
[31]:
fig = plt.figure()
# Note: We invert the y-axis to represent the image coordinate system
plt.gca().invert_yaxis()
ax = plt.gca()
surf = ax.scatter(X, Y, c=Z, cmap=cm.coolwarm)
for i in range(0, n_iterations - 1):
plt.plot(x_vals[i : i + 2], y_vals[i : i + 2], "wx-")
plt.plot(descent_data[0][0], descent_data[0][1], "bo")
plt.plot(descent_data[n_iterations - 1][0], descent_data[n_iterations - 1][1], "ro")
plt.plot(max_position[0], max_position[1], "k^")
plt.plot(min_position[0], min_position[1], "kv")
[31]:
[<matplotlib.lines.Line2D at 0x7f23d9dd5dc0>]
[32]:
max_position
[32]:
[13.600000000000001, 16.0]
Resample the moving image#
In order to apply the results of gradient ascent we must resample the moving image into the domain of the fixed image. The TranslationTransform whose parameters have been selected through gradient ascent is used to dictate how the moving image is sampled from the fixed image domain. We can compare the two images with itkwidgets to verify that registration is successful.
[33]:
ResampleFilterType = itk.ResampleImageFilter[MovingImageType, FixedImageType]
resample = ResampleFilterType.New(
Transform=transform,
Input=moving_img,
Size=fixed_img.GetLargestPossibleRegion().GetSize(),
OutputOrigin=fixed_img.GetOrigin(),
OutputSpacing=fixed_img.GetSpacing(),
OutputDirection=fixed_img.GetDirection(),
DefaultPixelValue=100,
)
[34]:
resample.Update()
[35]:
view(resample.GetOutput())

[35]:
<itkwidgets.viewer.Viewer at 0x7f23d9d70610>
Clean up#
[36]:
os.remove(fixed_img_path)
os.remove(moving_img_path)
